2019
The SOUP project: current state and future activities Proceedings Article
In: Extended abstract and presentation at the 10th Int. Conf. on Information, Intelligence, Systems and Applications (IISA‘19), 2019.
2018
Development and experimental assessment of a flexible robot fin Proceedings Article
In: 2018 IEEE International Conference on Soft Robotics (RoboSoft), pp. 208-213, 2018.
Design and development of a mechatronic transradial prosthesis Proceedings Article
In: Proc. 17h Int. Symp. on Ambient Intelligence and Embedded Systems (AmiEs), 2018.
Static output feedback canonical forms Journal Article
In: IMA Journal of Mathematical Control and Information, vol. 36, no. 2, pp. 537-567, 2018, ISSN: 0265-0754.
2016
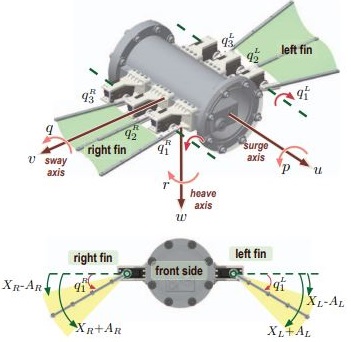
Steering-plane motion control for an underwater robot with a pair of undulatory fin propulsors Proceedings Article
In: 2016 24th Mediterranean Conference on Control and Automation (MED), pp. 496–503, IEEE 2016.
Effects of compliance in pedundulatory locomotion over granular substrates Proceedings Article
In: 2016 24th Mediterranean Conference on Control and Automation (MED), pp. 532-538, 2016.
Design, development and control of the anthropomorphic robotic hand TALOS Proceedings Article
In: Proc. 15h Int. Symp. on Ambient Intelligence and Embedded Systems (AmiEs), 2016, (6 pages).
2015
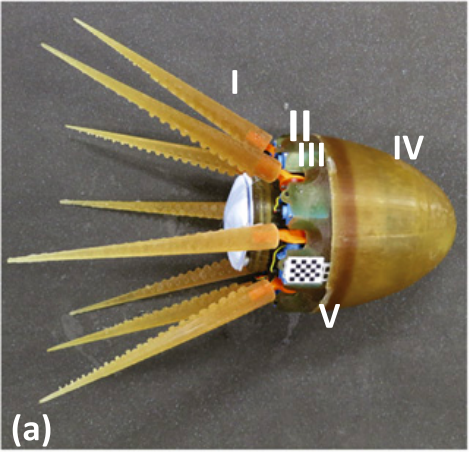
Octopus-inspired multi-arm robotic swimming Journal Article
In: Bioinspiration & biomimetics, vol. 10, no. 3, pp. 035005, 2015.
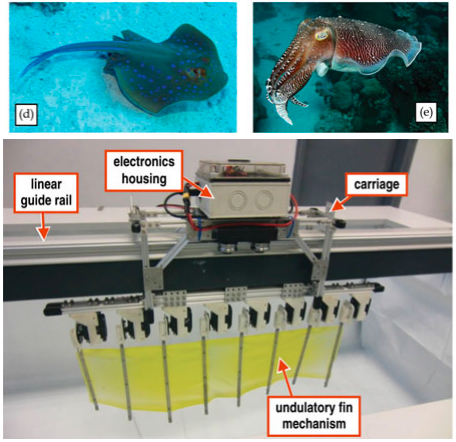
Experimental investigation and propulsion control for a bio-inspired robotic undulatory fin Journal Article
In: Robotica, vol. 33, no. 5, pp. 1062–1084, 2015.
Model-based fin ray joint tracking control for undulatory fin mechanisms Proceedings Article
In: 2015 7th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), pp. 158-165, 2015.
Multi-arm robotic swimmer actuated by antagonistic SMA springs Proceedings Article
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1540-1545, 2015.
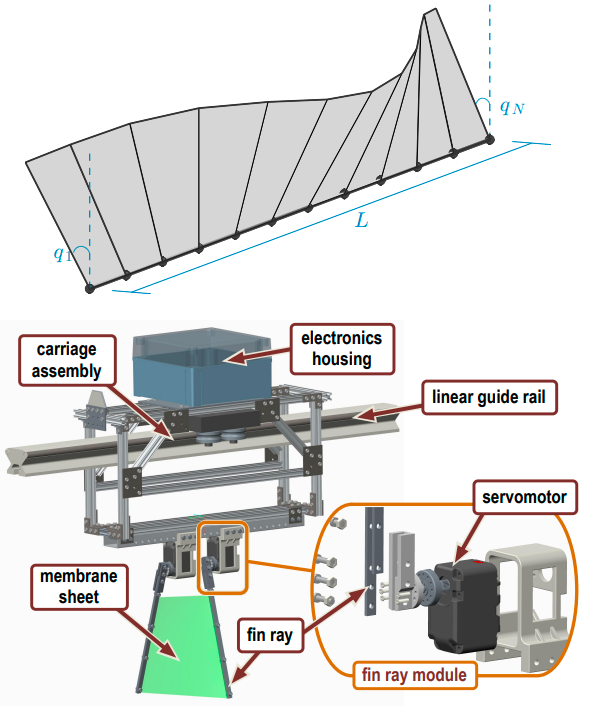
Dynamic modeling and experimental analysis of a two-ray undulatory fin robot Proceedings Article
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 339–346, IEEE 2015.
2014
A closed-loop position control scheme for SMA-actuated joints Proceedings Article
In: 22nd Mediterranean Conference on Control and Automation, pp. 1527-1532, 2014.
Vibration-Induced Frictional Reduction in Miniature Intracorporeal Robots Journal Article
In: IEEE Transactions on Robotics, vol. 30, no. 5, pp. 1210-1221, 2014.
2013
Turning maneuvers of an octopus-inspired multi-arm robotic swimmer Proceedings Article
In: 21st Mediterranean Conference on Control and Automation (MED), pp. 1343-1349, 2013.
Octopus-inspired eight-arm robotic swimming by sculling movements Proceedings Article
In: 2013 IEEE International Conference on Robotics and Automation, pp. 5155-5161, 2013.
2012
Modeling and control for object manipulation by a two d.o.f. robotic hand with soft fingertips Proceedings Article
In: pp. 259–264, 2012.
2009
Undulatory and pedundulatory robotic locomotion via direct and retrograde body waves Proceedings Article
In: 2009 IEEE International Conference on Robotics and Automation, pp. 3457-3463, 2009.
2003
Grasping control of rolling manipulations with deformable fingertips Journal Article
In: IEEE/ASME transactions on mechatronics, vol. 8, no. 2, pp. 283–286, 2003.
2002
Feedback control for object manipulation by a pair of soft tip fingers Journal Article
In: Robotica, vol. 20, no. 1, pp. 1–11, 2002.