2025
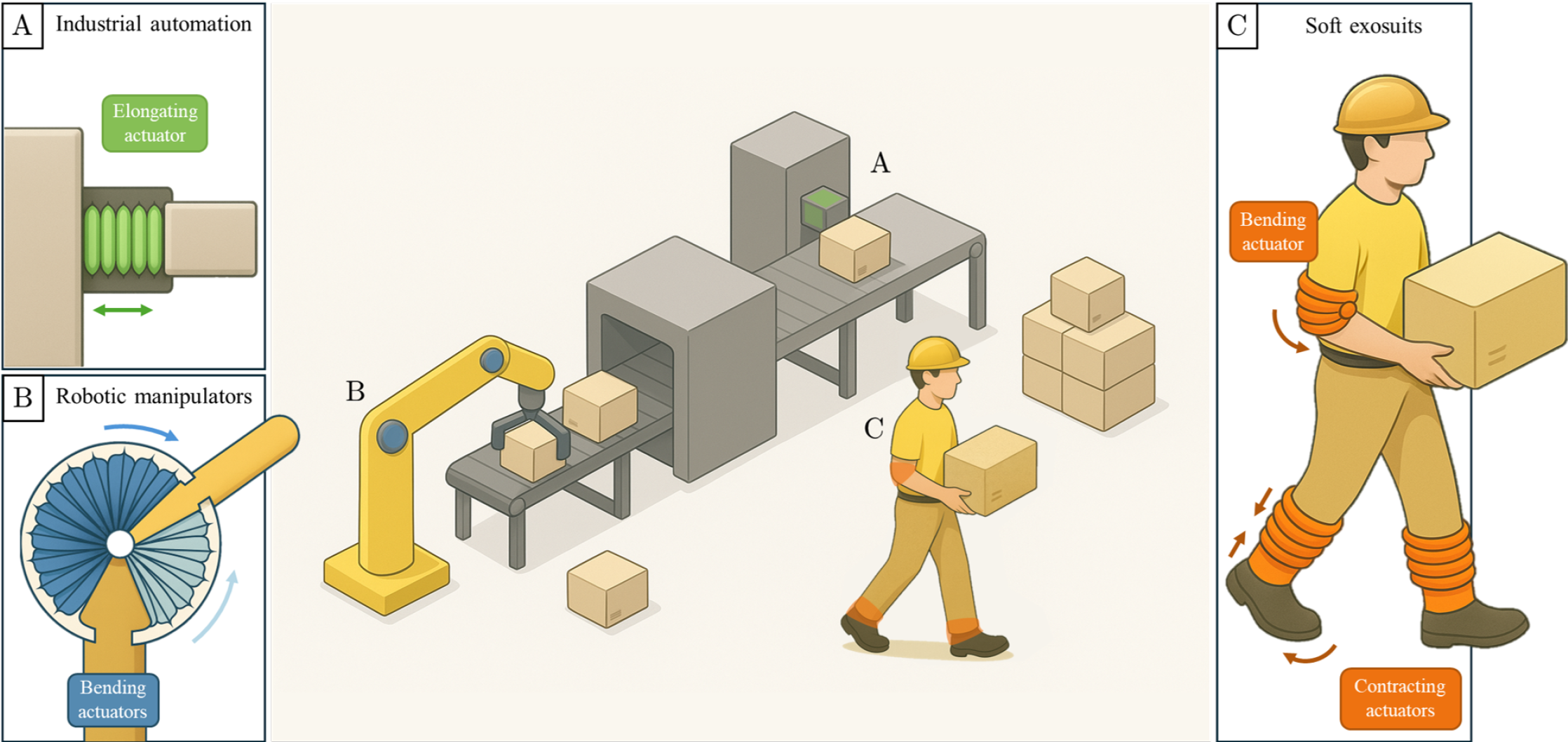
A Unified Framework for Soft Inflatable Fabric Actuators Journal Article
In: Scientific Reports, vol. 15, iss. 1, pp. 41629, 2025, ISSN: ISSN 2045-2322.
Flexible Sensor Foil Based on Polymer Optical Waveguide for Haptic Assessment Journal Article
In: Sensors, 2025, ISSN: 1424-8220.
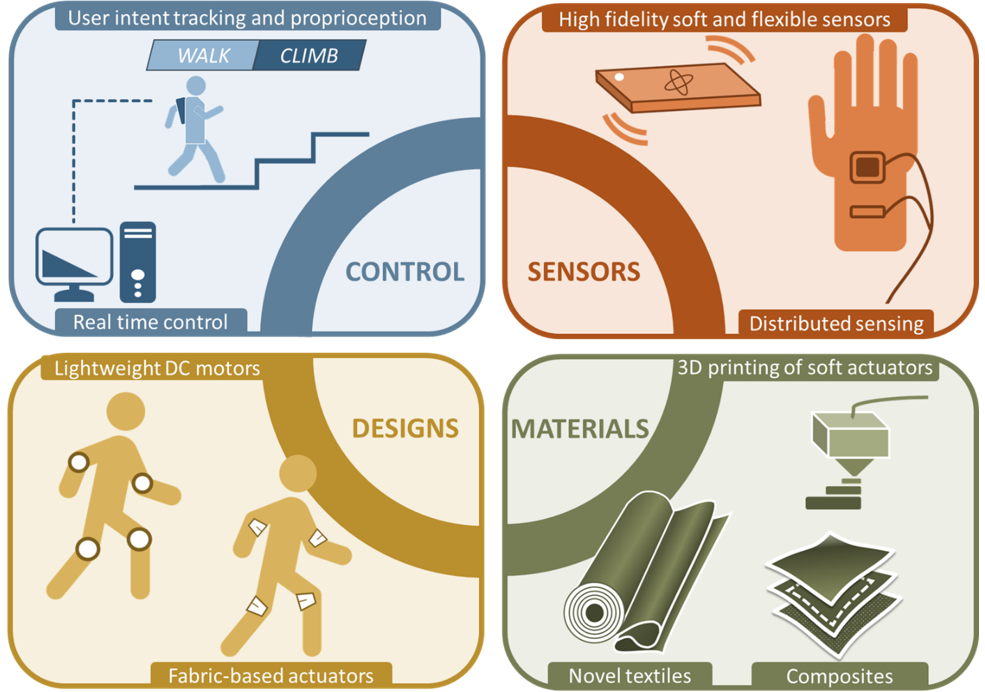
Medical & Healthcare Robotics: A Roadmap for Enhanced Precision, Safety, and Efficacy Journal Article
In: Measurement Science and Technology, 2025, ISSN: 1361-6501.
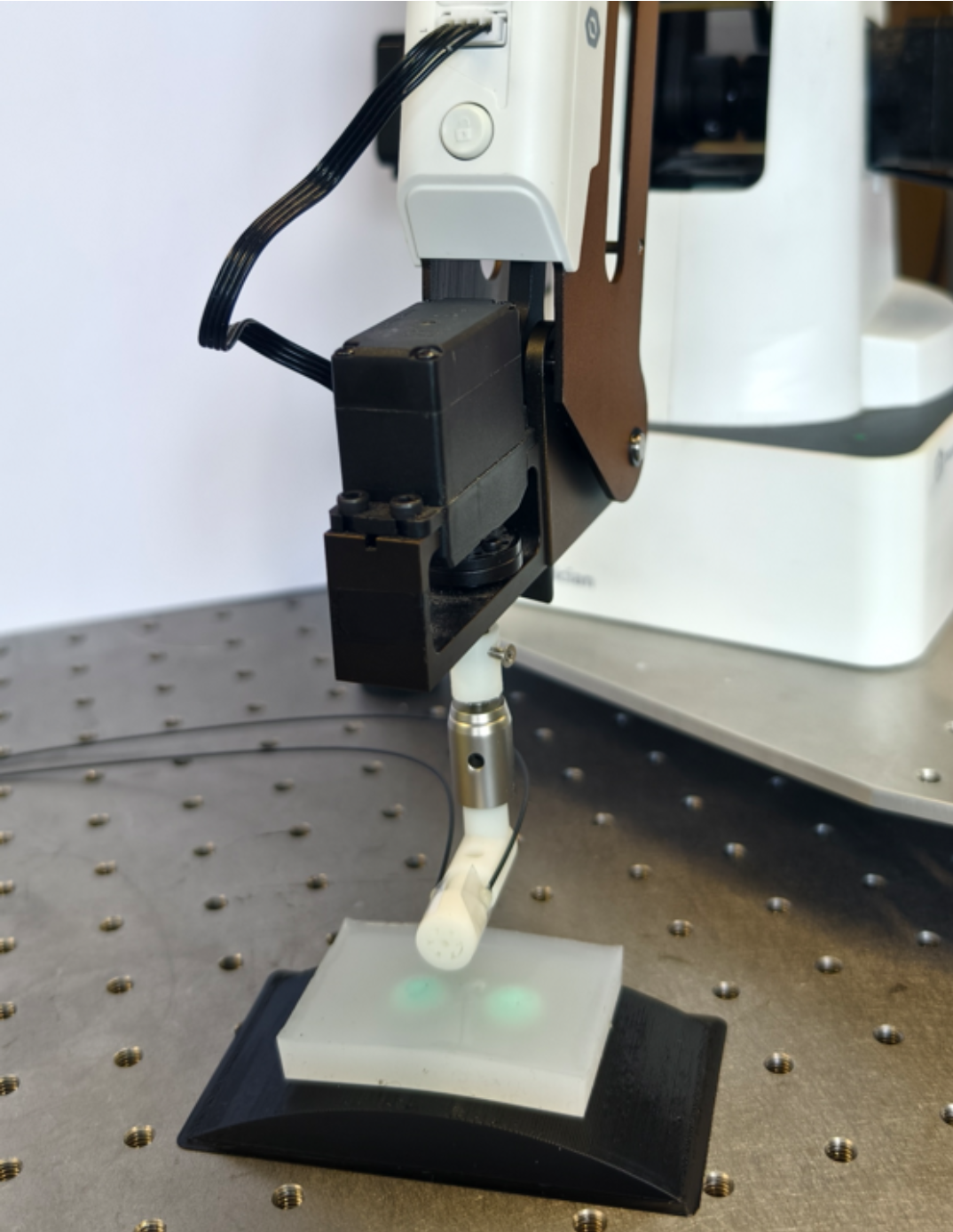
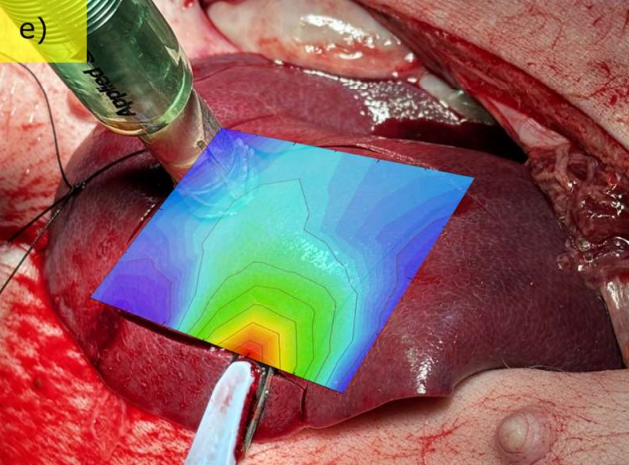
In-Vivo Study on the Safe Use of a Novel Intraoperative Sensing Tool for Tissue Stiffness Assessment in Endoscopic Surgery Journal Article
In: Biosensors, vol. 15, iss. 9, no. 581, 2025, ISSN: 2079-6374.
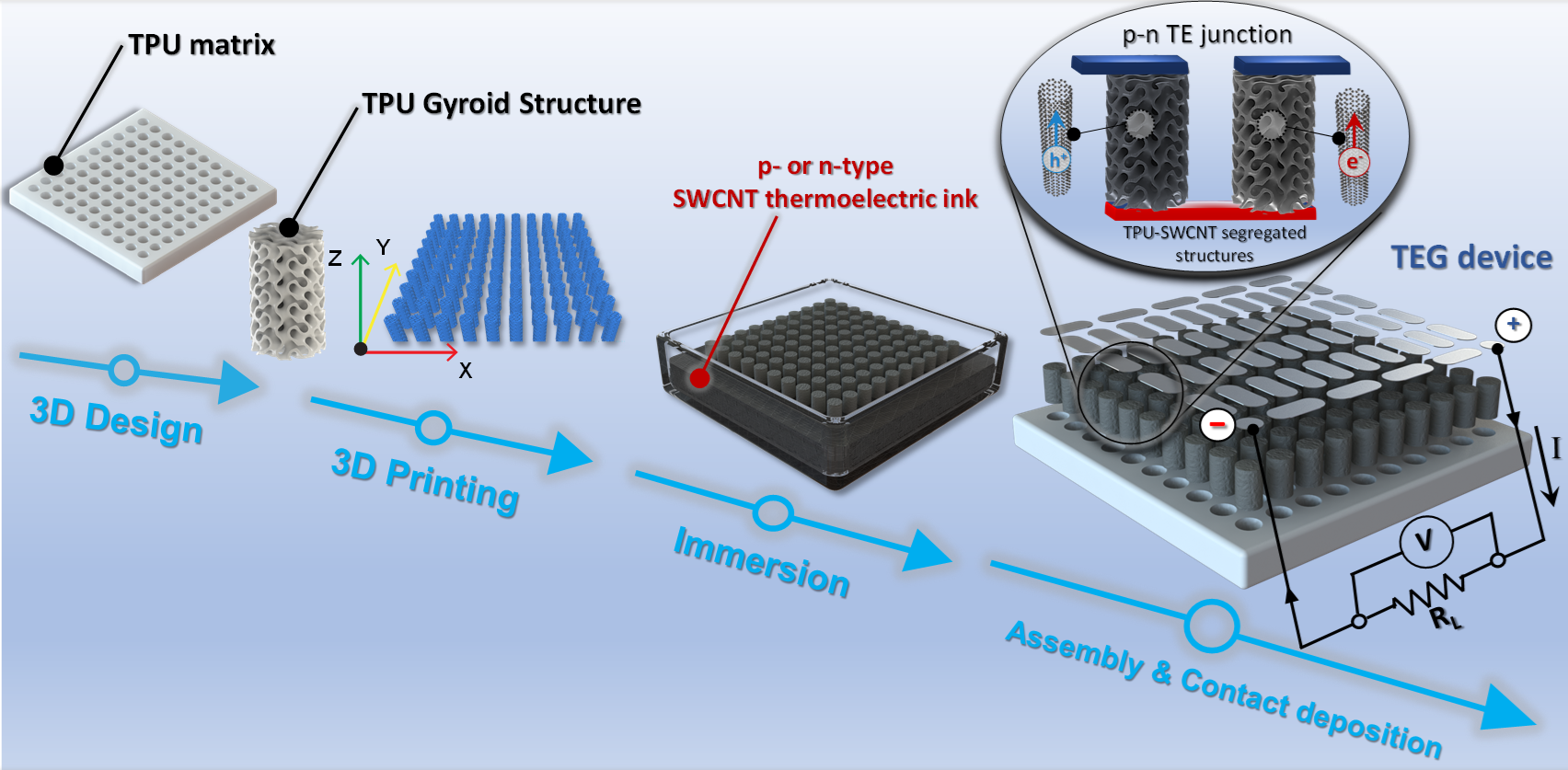
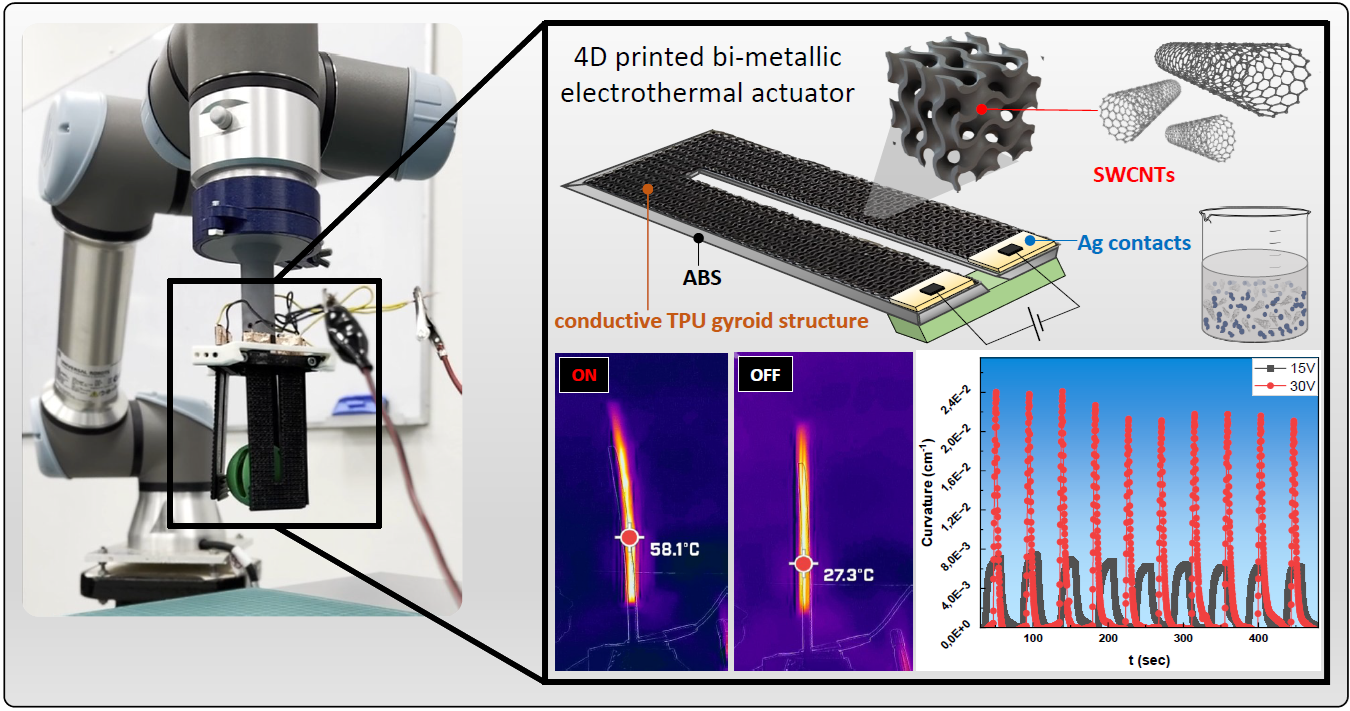
In: Chemical Engineering Journal, vol. 520, 2025, ISSN: 1385-8947.
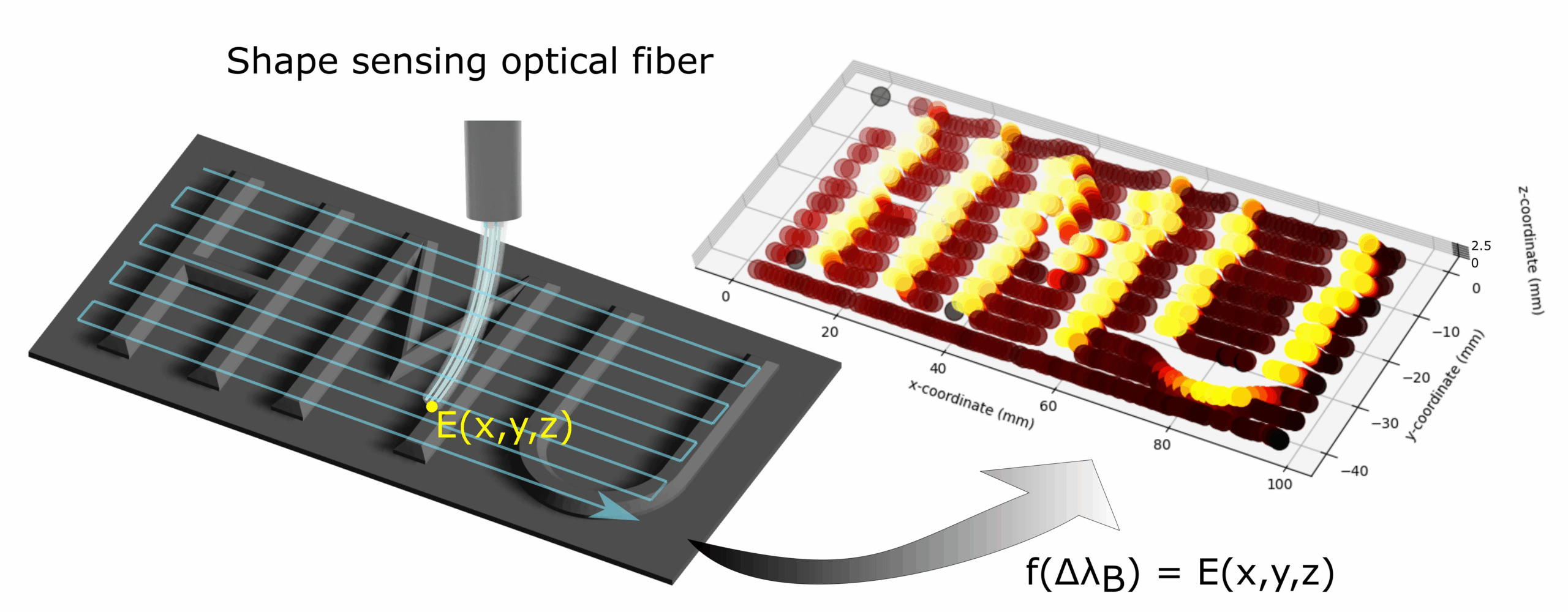
Rapid and accurate shape sensing method using a multi-core Fiber Bragg Grating-based optical fiber Journal Article
In: Sensors, vol. 25, no. 14, pp. 4494, 2025, ISSN: 1424-8220.
In: ACS Applied Materials & Interfaces, vol. 17, iss. 29, 2025.
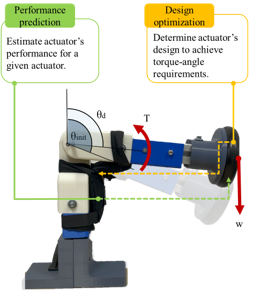
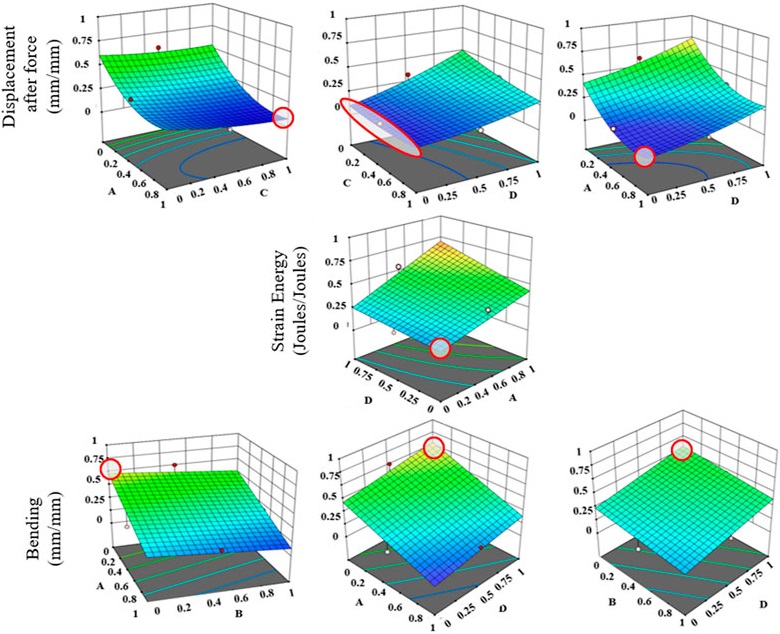
Introducing Dimensional Analysis on Soft Inflatable Fabric Actuators Journal Article Forthcoming
In: Advanced Intelligent Systems, vol. 7, iss. 12, Forthcoming, ISSN: 2640-4567.
Optimized Area Coverage in Disaster Response Utilizing Autonomous UAV Swarm Formations Proceedings Article
In: IEEE 33rd Mediterranean Conference on Control and Automation (MED), pp. 630-635, Tangier, Morocco, 2025, ISSN: 2473-3504.
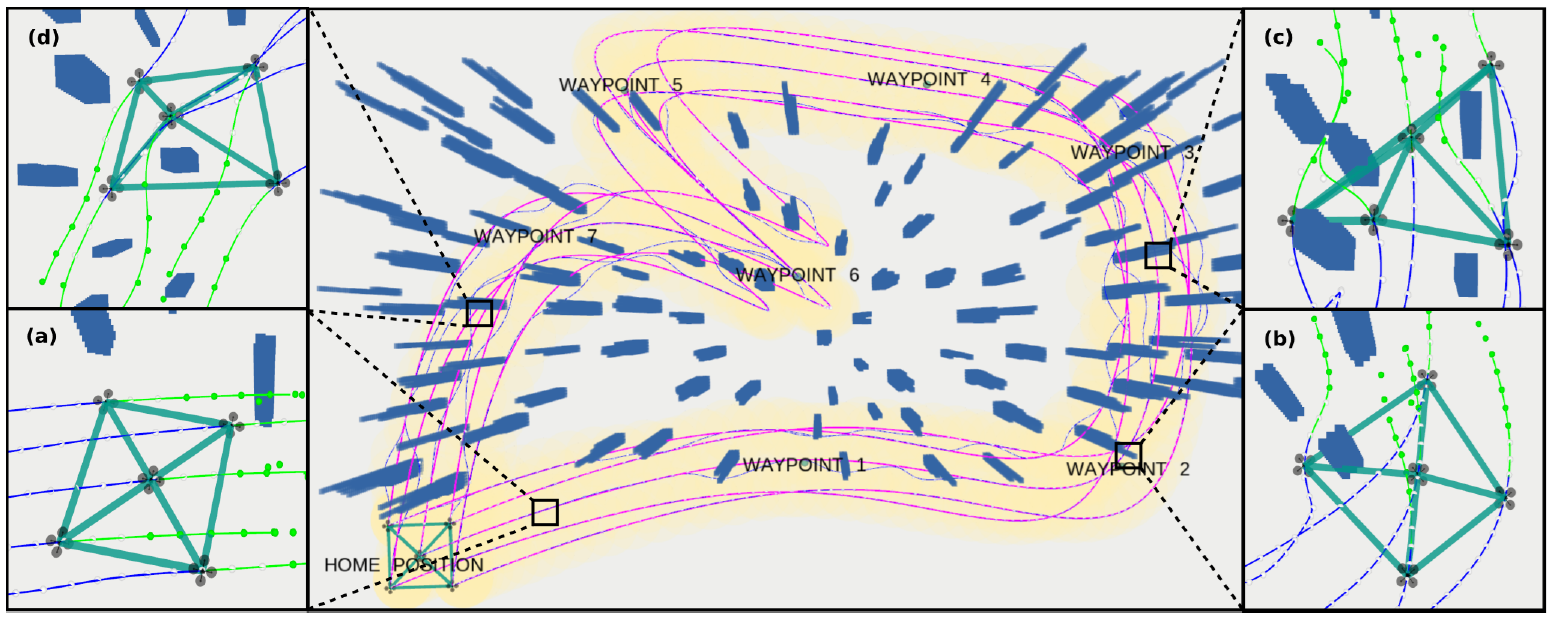
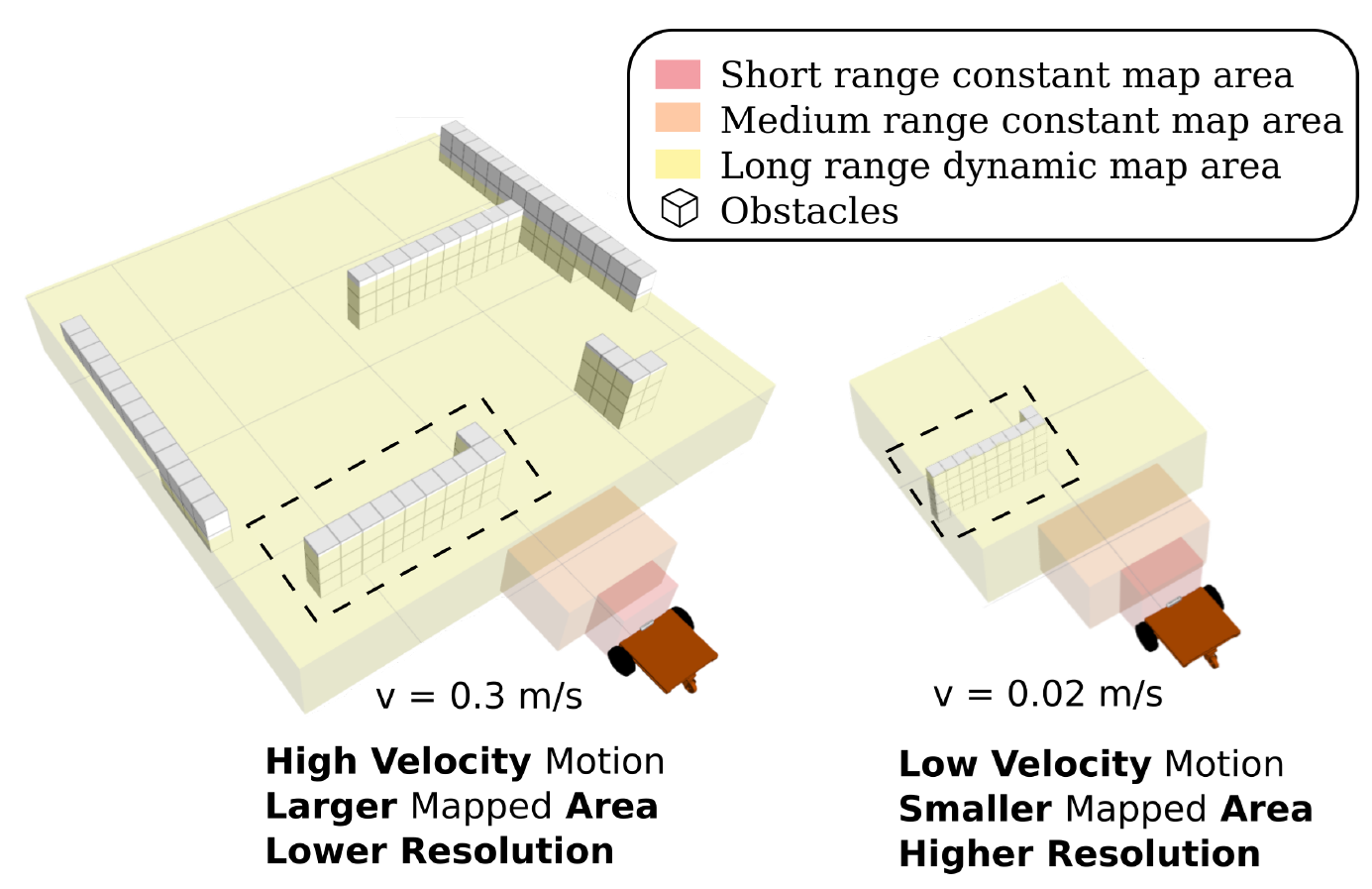
Exploiting a Variable-Sized Map and Vicinity-Based Memory for Dynamic Real-Time Planning of Autonomous Robots Journal Article
In: Robotics, vol. 14, iss. 4, 2025.
Fiber Bragg grating-based tactile sensing tool for minimally invasive surgery Proceedings Article
In: SPIE Photonics West BiOS, pp. 1331002, SPIE, San Francisco, California, United States, 2025.

A Control Scheme for Collaborative Object Transportation between a Human and a Quadruped Robot Using the MIGHTY Suction Cup Proceedings Article
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 16305-16311, 2025.
2024
Omnidirectional Soft Pneumatic Actuators: A Design and Optimization Framework Journal Article
In: Frontiers In Robotics and AI, vol. 11, 2024.
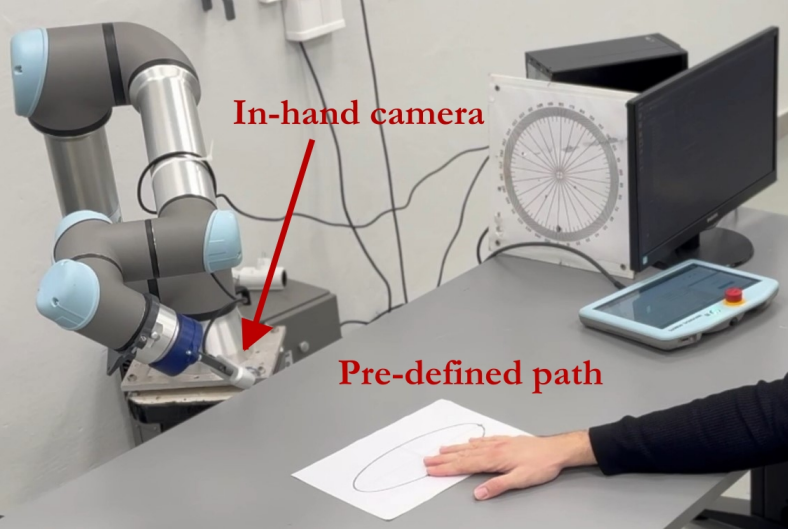
ActIVO: An Active perception framework for skill transfer through Iterative Visual Observations Proceedings Article
In: 32nd Mediterranean Conference on Control and Automation (MED), pp. 94-100, 2024.
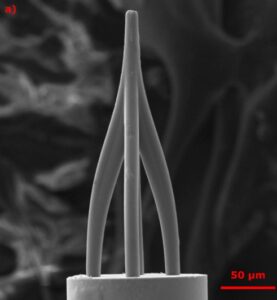
Single-to-four core optical fiber coupling using a two-photon polymerization produced waveguide Journal Article
In: Optics Express, vol. 32, iss. 8, pp. 14240-14251, 2024.
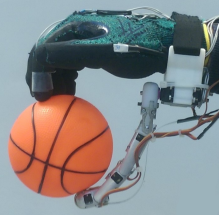
A Mechatronic Thumb for Grasping and In-Hand Manipulation Tasks Journal Article
In: IEEE Transactions on Medical Robotics and Bionics, 2024, (in press / available online).
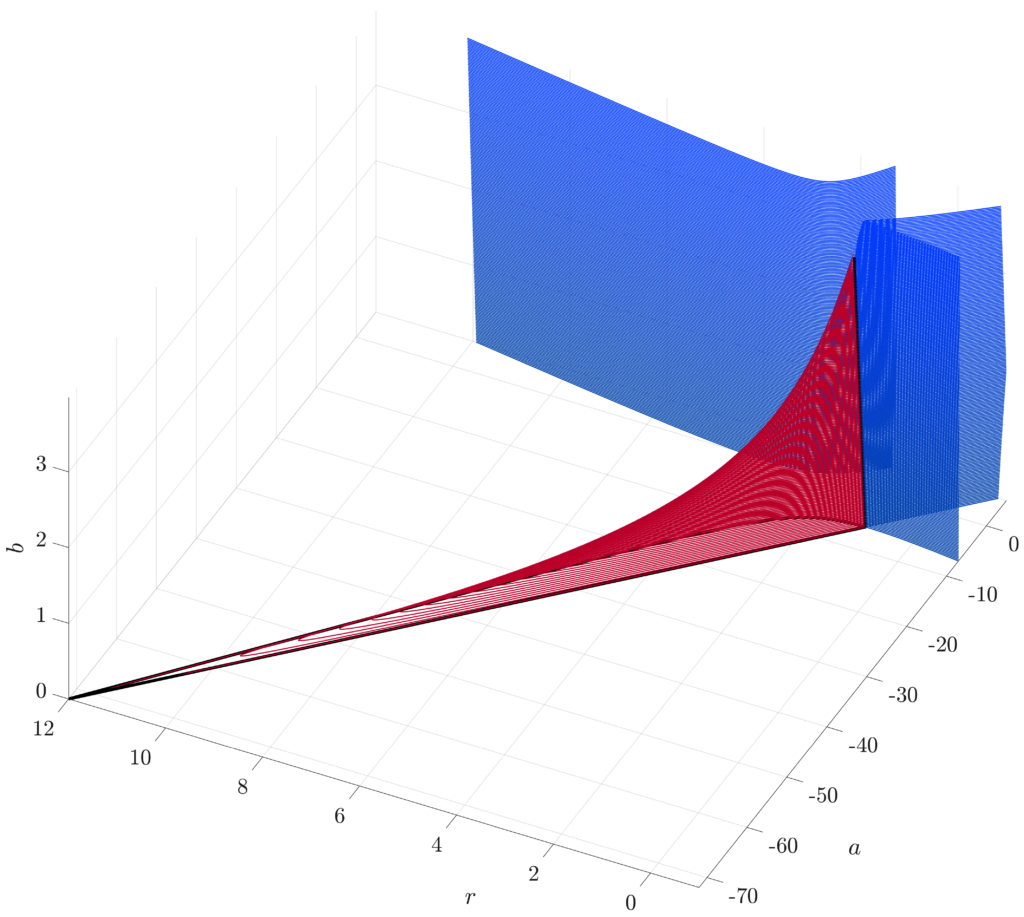
On the stability of parametric polynomials Journal Article
In: International Journal of Control, pp. 1–18, 2024, (in press / available online).
An Octopus-Inspired Soft Pneumatic Robotic Arm Journal Article
In: Biomimetics, vol. 9, iss. 12, pp. 773, 2024, ISSN: 2313-7673.
2023
Invariant output feedback stabilisability: the scalar case Journal Article
In: International Journal of Control, vol. 96, iss. 12, pp. 3168-3182, 2023.
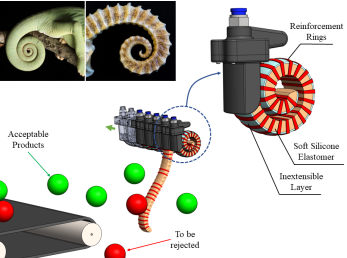
SoftER: A spiral soft robotic ejector for sorting applications Journal Article
In: IEEE Robotics and Automation Letters, vol. 8, iss. 11, 2023.